Navigation guidée dynamique en endodontie
Dossier Nos acteurs du numérique
AO News #54 - Novembre 2022

Introduction
Les évolutions de ces dernières années dans le domaine de l’endodontie ont permis d’améliorer le diagnostic initial et l’étude anatomique grâce au cône beam CT (CBCT), la précision opératoire grâce au microscope et la mise en forme canalaire grâce au traitement thermique des limes rotatives. Cette combinaison de moyens a permis le développement d’une approche minimalement invasive, de la cavité d’accès à la mise en forme, avec la préservation tissulaire comme leitmotiv.
Aborder la problématique des oblitérations canalaires dans cet esprit reste un défi. La recherche de la perméabilité au microscope est fastidieuse car il faut multiplier les vérifications, faute de vision directe. C’est également peu reproductible et aléatoire d’une dent à une autre. Enfin, la destruction tissulaire peut être importante, avec le risque de création de faux canal ou de perforation. Il manquait un outil pour guider le praticien pendant le forage de l’accès.
L’une des solutions a été d’adapter les guides statiques chirurgicaux implantaires à un usage endodontique. L’axe de forage, planifié sur le CBCT, est défini par
une douille présente dans le guide. Des forets spéciaux ont été développés pour répondre aux besoins de l’endodontie : un diamètre faible (0.8 - 1mm) et une forme adaptée au travail dans la
dentine. Plusieurs études (1-2) ont démontré l’efficacité de cette méthode mais des inconvénients sont mis en avant (3) :
- impossibilité de modifier l’axe de forage pendant l’intervention, le guide devient inutilisable si des erreurs se sont accumulées dans le workflow digital,
- nécessité d’une grande ouverture buccale en postérieur pour compenser l’épaisseur du guide et des forêts,
- équipement important avec un temps de conception long et incompressible.
Pour pallier à ses défauts, une autre solution a été développée : la navigation guidée dynamique (NGD). Cette technologie vient de la médecine générale et a été
appliquée en implantologie dans les années 2000. Son utilisation en endodontie a commencé à être étudiée à partir de 2019 (4). Plusieurs études ont
démontré une même efficacité que les guides statiques, une plus grande précision qu’à main levée, que ce soit dans l’angle ou la préservation de tissu dentaire. Le forage devient reproductible
mais également modifiable en cours d’intervention (5,6,7,8).
La fait de ne requérir qu’un CBCT pour pouvoir mettre en œuvre le protocole est également un avantage pour se servir de la NGD de manière imprévue. La courbe d’apprentissage, qui peut être longue, et un coût important représentent les freins actuels au développement de cette technique.
Matériel et méthode
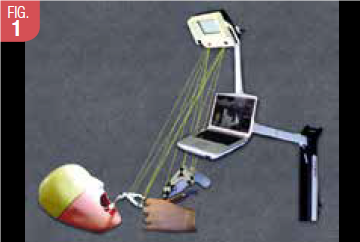
Le principe de la NGD repose sur 3 outils :
- la localisation spatiale continue d’une fraise ou d’un forte par des caméras infra-rouges (Fig.1),
- l’utilisation d’un CBCT pour planifier l’accès au canal calcifié (Fig.2),
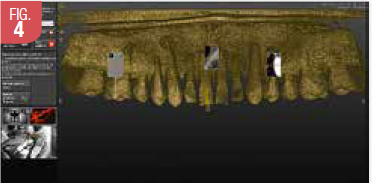
- l’utilisation d’un traceur pour cartographier en temps réel les structures orales choisies comme repères (dent, support thermoplastique ou minivis) et les faire correspondre au CBCT (Fig.3,4).


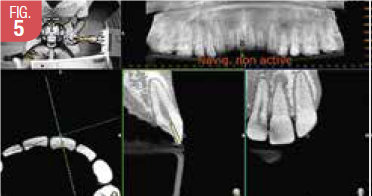
Le tracing est l’étape la plus importante du protocole, toute la précision de l’accès canalaire en découle. Le système doit pouvoir détecter le repère patient + le
traceur, et le praticien doit pointer les structures choisies dans un ordre strict. A la fin de l’enregistrement, une vérification de la précision est effectuée pour valider cette étape
(Fig. 5). Il est fréquent au début de l’utilisation de cacher le repère patient, de mal orienter le traceur ou de mal positionner la caméra et ainsi perdre
l’acquisition en cours.

La prise en main du contre angle et sa détection par les caméras modifie l’interface, qui affiche une cible matérialisant l’axe de forage et la profondeur est visible juste à côté. L’axe sagittal et transversal sont visibles également. Une calibration du contre angle puis de la fraise est réalisée et une dernière vérification de précision est faite (Fig. 6). On peut également utiliser des piézotomes et des inserts ultrasoniques de la même manière. Le logiciel est capable de distinguer plusieurs marqueurs de contre angle, ce qui permet par exemple d’alterner sans interruption l’utilisation de fraises à basse vitesse montées sur un contre angle à bague bleue avec des fraises à haute vitesse montées sur un contre angle à bague rouge.
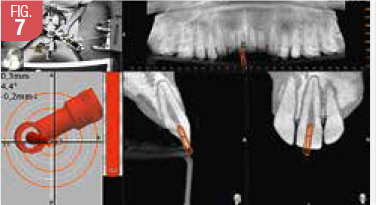
Une alerte sonore et visuelle permet d’informer le praticien de l’atteinte de l’objectif fixé (Fig. 7). Une fois la perméabilité confirmée par le passage d’une lime manuelle, le dispositif complet (marqueurs et chariot) est retiré, pour plus de confort, et le traitement endodontique peut se poursuivre de manière conventionnelle.
Approche in vitro
Pour pouvoir maitriser la NGD et ses différentes étapes, le fabricant fournit une tête fantôme sur laquelle deux modèles d’entrainement peuvent être installés. Le CBCT correspondant aux modèles sont pré-installés et des essais peuvent être immédiatement réaliser dans les zones édentées contenant de la cire (Fig. 8). Mais ceux-ci sont développés pour l’implantologie et il n’y a pas d’endodonte à parcourir.
L’impression 3D a considérablement progressé et des modèles très réalistes ont vu le jour. Ceux élaborés par la société Delendo, dénommé True Jaw Calcified Canals, permettent, une fois mis en place sur une tête fantôme, d’avoir une reproduction extrêmement proche du réel (Fig. 9). La résine utilisée ne peut reproduire la dureté de la dentine mais ces modèles permettent de s’entrainer et de s’habituer au forage indirect pour aller chercher une perméabilité.
Dans notre cas, le modèle maxillaire nous a permis de simuler le cas clinique à venir et de travailler à l’ergonomie (disposition des repères, acquisition du tracing, gestion de l’axe du forage). Il est possible de poser un champ opératoire avec un clamp unitaire mais également en multi-clampage, ce qui a été réalisé (Fig. 10).



Le protocole d’accès canalaire
Le forage coronaire débute avec un marquage à la fraise boule diamantée stérile montée sur un contre-angle bague rouge des 4 points d’entrée, avec la tête du contre-angle maintenue par les 2 mains : cette méthode permet de ne pas déraper en entrant au contact de la dent et de pouvoir modifier la position avant d’entrer en profondeur dans la dent (Fig. 11). L’accès coronaire se poursuit avec une fraise boule diamantée stérile long col.
Le forage radiculaire est réalisé avec une fraise stérile long col tungstène montée sur un contre-angle bague bleu (EndoTracer, Komet) (Fig. 12). Cette fraise est disponible en 2 longueurs (31et 34mm) et d’un diamètre entre 0,4 et 1mm est adaptée à une utilisation en endodontie guidée. Mais sa forme non continue, avec un élargissement progressif depuis le tiers moyen, peut gêner en cas d’accès minimalement invasif. Des forets d’endodontie guidée statique peuvent être utilisés pour solutionner ce problème, de type forêt long col Steco (BioSummer3D). Mais ils n’ont pas une grande souplesse latérale et peuvent casser en cas de correction d’axe.



Conclusion
La NGD a permis dans notre cas d’obtenir une perméabilité sur les 4 dents en optimisant la préservation tissulaire et en permettant une reproductibilité dans la technique d’accès. L’apport de la NGD en endodontie ouvre des possibilités pour la chirurgie péri-apicale, le retraitement canalaire, la création ex-nihilo d’un canal dans une dent complètement oblitérée, le ciblage d’un canal MV2 sur une molaire maxillaire.
Cette technique offre au praticien la possibilité d’être minimalement invasif dans des situations canalaires compliquées, afin d’augmenter les chances de conservation de la dent sur l’arcade.
Bibliographie
1. Zehnder, M.S.; Connert, T.; Weiger, R.; Krastl, G.; Kühl, S. Guided endodontics: Accuracy of a novel method for guided access cavity preparation and root canal location. Int. Endod. J. 2016;49:966–972.
2. Krastl, G.; Zehnder, M.S.; Connert, T.; Weiger, R.; Kühl, S. Guided Endodontics: A novel treatment approach for teeth with pulp canal calcification and apical pathology. Dent. Traumatol. 2016;32:240–246.
3. Jain SD, Saunders MW, Carrico CK, Jadhav A, Deeb JG, Myers GL. Dynamically Navigated versus Freehand Access Cavity Preparation: A Comparative Study on Substance Loss Using Simulated Calcified Canals. J Endod. 2020 Nov;46:1745-1751
4. Chong BS, Dhesi M, Makdissi J. Computer-aided dynamic navigation: a novel method for guided endodontics. Quintessence Int. 2019;50:196-202
5. Connert T, Leontiev W, et al. Real-Time Guided Endodontics with a Miniaturized Dynamic Navigation System Versus Conventional Freehand Endodontic Access Cavity Preparation: Substance Loss and Procedure Time. J Endod. 2021;47:1951-56
6. Zubizarreta-Macho Á, Muñoz AP, Deglow ER, Agustín- Panadero R, Álvarez JM. Accuracy of computer-aided dynamic navigation compared to computer-aided static
procedure for endodontic access cavities: an in vitro study. J Clin Med. 2020;9:129.
7. Gambarini G, Massimo G, Morese A., et al Precision of Dynamic Navigation to Perform Endodontic Ultraconservative Access Cavities: A Preliminary In Vitro Analysis. J Endod. 2020;46:1286-90
8. Connert T, Krug R, et al. Guided Endodontics versus Conventional Access Cavity Preparation: A Comparative Study on Substance Loss Using 3-dimensional–printed Teeth. J Endod. 2019;45:327-31