Synergie clinique laboratoire, Le clone digital au service de la mise en charge immédiate
Dossier du mois : Le MODJAW, une nouvelle corde à notre arc thérapeutique en duo praticien prothésiste
Janvier 2023 - AO News #55

Introduction
Depuis des années, le numérique bouleverse nos vies au quotidien. Il en est naturellement de même dans nos professions de chirurgiens-dentistes et prothésistes. Les
outils nous permettent aujourd’hui de collecter l’intégralité des informations concernant nos patients : données en 2D, en 3D et maintenant en 4D avec l’avènement du Jaw-Motion et du Motion
Capture. C’est une petite révolution qui nous oblige à penser et structurer de nouveaux protocoles tant en clinique qu’au laboratoire. C’est une démarche essentielle pour optimiser nos
traitements et rendre nos prises en charge à la fois prédictibles, reproductibles et viables économiquement avec les investissements nécessaires pour s’équiper.
Les patients sont de plus en plus demandeurs de traitements rapides, prédictibles et reproductibles. Nous sommes dans une société dictée par la consommation et
l’immédiateté, et malheureusement notre offre de soins n’y échappe pas. Il devient indispensable de créer des protocoles fiables et synergiques entre le cabinet et le laboratoire et c’est fort
heureusement ce que les outils digitaux nous permettent aujourd’hui.
Présentation du cas clinique
Une patiente de 47 ans nous est référée par son parodontiste pour une prise en charge implantaire. Excédée par un maintien palliatif parodontal depuis de nombreuses années, elle ne supporte plus les mobilités dentaires, le proglissement, la diminution de dimension verticale et les espaces apparus entre ses dents. Elle souhaite une réhabilitation complète, fixe implanto-portée.
Pour ces traitements, nous avons établi un protocole strict de collecte de données numériques qui vise à aboutir à la création d’un avatar numérique de notre patiente, mais aussi à la genèse d’un plan de traitement virtuel préalable à toute intervention. Celui-ci sert de base à la présentation au patient ainsi qu’à la genèse du devis.
Collecte des données numériques
La première consultation est un moment crucial d’échange avec le patient pour bien cerner ses attentes, mais aussi pour la collecte des informations numériques. Elles sont enregistrées dans les trois plans de l’espace en 2D, 3D et depuis peu on y adjoint une notion de temporalité, et notamment de temporalité occlusale, grâce au motion capture permis par le Modjaw.
Collecte des données 2D
C’est le point de départ de tout plan de traitement, ne serait-ce que pour des raisons de documentation du dossier médical. L’appareil photo réflex est l’outil de choix. Associé à un équipement simple de studio photographique type softbox et synchronisation de flash (Fig. 1), il permet l’enregistrement de photos et vidéos reproductibles dans le temps et exploitable aisément par les logiciels de Smile Design. Nous privilégions l’application web Smile Cloud® (Fig. 2) développée par notre confrère chirurgien-dentiste, Florin Cofar. C’est un outil puissant qui associe à la fois un espace cloud collaboratif et de stockage de données, ainsi qu’un environnement de simulation du sourire propulsé par de l’Intelligence Artificielle. En quelques clics, on va définir un espace de reconstruction, générer un sourire photoréaliste avec des morphologies dentaires uniques pour le patient et la possibilité de télécharger les bibliothèques dentaires 3D utilisables dans les logiciels de modélisation dentaire dédiées au laboratoire de prothèse comme Exocad® (Fig. 3).



Collecte des données 3D
- C’est un des items les plus fournis en matériels disponibles. L’outil de base est la caméra de prise d’empreinte optique (Fig. 4). Procédé décrit dans les années 70 par le Pr François Duret (Fig. 5), l’adoption en masse n’en est qu’à ses balbutiements actuellement. Les outils sont aujourd’hui matures et permettent une acquisition qualitative et reproductible, notamment grâce au travail énorme des algorithmes d'agrégation d'images tel que le ScanAssist® (TRIOS). En première consultation, on réalise l’empreinte optique des arcades maxillaires (Fig. 6) et mandibulaires, ainsi qu'une prise d'occlusion dans une position reproductible. Les données numérisées seront exportées vers le Modjaw (Fig. 7) pour l’enregistrement de la temporalité occlusale.




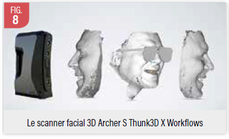
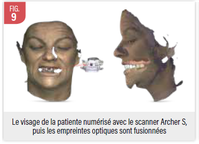
- Le second outil est le scanner facial. Aujourd’hui, des systèmes comme l’Archer S de Thunk 3D (Fig. 8) permettent un enregistrement d’un maillage 3D de qualité, et notamment des dents ou des maquettes d'occlusion, permettant au laboratoire de prothèse un matching parfait 3D/3D des dents issues de l’empreinte intra-orale et du scanner facial (Fig. 9). Cet outil permet de définir aisément les plans de références, la ligne du sourire, le découvrement et le soutien de la lèvre.
- Le CBCT (Fig. 10) quant à lui va nous fournir les informations sur les tissus durs sous jacents, nous permettant de mettre en évidence les volumes osseux et les structures anatomiques, mais aussi l’espace disponible entre les procès alvéolaires et la gencive.
Tous ces éléments combinés entre eux permettent un travail précis sur une réplique virtuelle du patient. Morphologies dentaires, plan d’occlusion, position des bords libres, occlusion, volumes osseux, positions des implants… La visualisation du cas est large et permet une approche globale.

Traitement des données, synergie avec le laboratoire de prothèse
Ce clone virtuel va permettre au couple praticien-prothésiste dentaire d’anticiper le projet prothétique (Fig. 11). C’est celui-là même qui sera utilisé pour guider les choix chirurgicaux et notamment les positions implantaires.
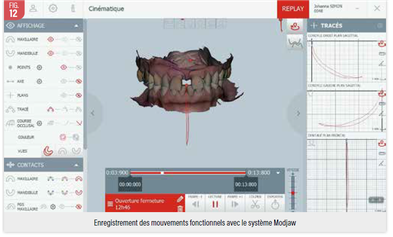
Dans ce cas clinique précis, la planification 2D Smile Cloud a permis de définir un espace de reconstruction, une position de bords libres, une morphologie et d’arrêter le choix prothétique sur un bridge à émergence dentaire. La bibliothèque dentaire en 3D utilisable sous Exocad est téléchargée. La numérisation du visage est fusionnée à l’empreinte optique et au CBCT. La temporalité occlusale capturée par le Modjaw est elle aussi ajoutée (Fig. 12). A ce stade, le technicien de laboratoire dispose alors d’une copie numérique du patient et peut travailler sur les différentes couches tridimensionnelles superposées.
En prenant en compte l’ensemble de ces éléments, il est décidé de recentrer et remonter la dimension verticale de la patiente. Pour cela, à l’aide des mouvements enregistrés dans Modjaw, on isole un mouvement de rotation pure ; par exemple enregistré lors de la manipulation de recherche de relation centrée. Puis on avance image par image dans ce mouvement de rotation de manière à sélectionner précisément une dimension verticale et un centrage satisfaisant. On demande alors au système de transposer tous les mouvements enregistrés à cette nouvelle dimension verticale.
Commence alors l’étape de conception du projet prothétique sur Exocad à cette nouvelle dimension verticale. Les morphologies dentaires utilisées sont celles issues du Smile Cloud. Une fois le projet final validé, on prépare l’exécution chirurgicale du cas (Fig. 13).
La bibliographie nous conforte dans l’utilisation de guides à appuis dentaires pour maximiser la précision. De plus, la conservation de dents améliore la qualité des empreintes complètes sur implants en permettant à la caméra de conserver un chemin de scannage. Nous nous orientons donc vers une transposition chirurgicale statique guidée à appui dentaire avec des extractions séquentielles. Deux jeux de fichiers sont préparés pour la planification implantaire à l’aide du logiciel 3Shape Implant Studio (Fig. 13)


Une fois les implants positionnés, un guide chirurgical est dessiné (Fig. 14) puis est imprimé (Fig. 15) en 3D grâce à la chaîne d’impression Sprint Ray (Fig. 16). Les résines utilisées et la chaîne de post-traitement assurent la certification biomédicale du dispositif sur mesure imprimé. Le jour de la chirurgie, les premières extractions sont réalisées, le guide est inséré, les implants posés. On installe les piliers multi-unit droits puis les scan-markers. Une première empreinte du maxillaire est réalisée scan markers et dents résiduelles en place, puis une seconde une fois les dernières dents extraites (Fig. 17). A ce stade pas de prise d'occlusion, pas de prise d’empreinte de l’antagoniste. Seule la position implantaire est enregistrée.
On viendra simplement importer le calque des positions d’implants dans notre projet prothétique existant sous Exocad de manière à concevoir et imprimer un bridge provisoire qui est placé dans l’heure de la chirurgie (Fig. 18). La production est faite avec la chaîne Sprint Ray de nouveau, en résine C&B MFH, en direct multi-unit. Seules les vis de fixation sont nécessaires (Fig. 19 et 20).




La patiente est revue à J7 puis à J15 le duplicata du bridge provisoire usinée en PMMA longue durée MultiStratum est mis en place (Fig. 21 et 22). A 3 mois post-chirurgical, la patiente est revue. Nous souhaitions réaliser un bridge à émergence dentaire, en full zircone, sans tibase directement sur MUA.
L'écueil connu des caméras de prise d’empreinte optique est leur relative imprécision sur les arcades complètes sur implants. Si l’imprécision de certaines machines est aujourd’hui acceptable avec la réalisation de barres titanes usinées surmontées de dents résines, elle ne pardonne malheureusement pas sur les restaurations full zircone. De plus, il a été montré que la reproductibilité de l’empreinte optique sur 4 ou 6 implants est directement liée à l’opérateur.
Nous utilisons donc le système PIC Dental (Fig. 23a et 23b). Ce système de photogrammétrie est un outil de mesure extrêmement rapide et précis des positions implantaires. Il génère un fichier STL utilisable directement dans Exocad (Fig. 24), avec seulement 3 microns de déviation, ce qui est négligeable. C’est ce simple fichier qui est à son tour importé dans notre projet prothétique Exocad, ainsi qu’une prise d’empreinte optique de la muqueuse cicatrisée (Fig. 25). A ce stade, toujours pas d’enregistrement de l’occlusion ni de l’antagoniste.
Le bridge est conçu sur le fichier PiC, puis usiné en Zircone YML. La connexion se fait en direct sur les piliers multi-unit, sans embases. L’intérêt d’une Zircone comme la KATANA YML est sa dualité de gradient, à la fois mécanique et esthétique avec une variance de translucidité. (Fig. 26) Le bridge est inséré de manière totalement passive puis serré à la clé dynamométrique.



Conclusion
Ce protocole simple et reproductible permet au moyen d’une collecte de données 2D 3D 4D la création d’un avatar virtuel du patient, un travail sur celui-ci, la genèse d’un projet prothétique puis chirurgical qui est conservé pendant toute la durée du traitement. Seules des couches sont ajoutées pour apporter des informations au fur à mesure des poses d’implants et des cicatrisations des tissus mous.
Retour au Dossier MODJAW - AO NEWS #55 - Janvier 2023